Magazine: Features
Interfaces on the go
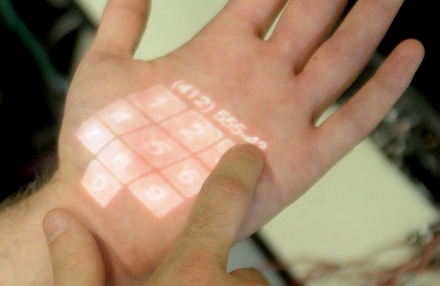
Enabling mobile micro-interactions with physiological computing.
Interfaces on the go
Full text also available in the ACM Digital Library as PDF | HTML | Digital Edition
Thank you for your interest in this article. This content is protected. You may log in with your ACM account or subscribe to access the full text.
Pointers
The ACM Special Interest Group on Computer Human Interaction (SIGCHI) keeps a handy calendar of events related to HCI
http://www.sigchi.org/conferences/calendarofevents.html
Jargon
Graphical User Interface
Human-Computer Interaction: a subfield of computer science
A usually flat surface that can detect multiple finger gestures, popularized by the iPhone, and a common component of tangible user interfaces
Tangible User Interface
Windows, Icons, Menus, Pointers, the typical way we interact with a GUI
What You See is More or Less What You Get